")
Трио специалистов из Кореи совместно с коллегами из США разработали четвероногого робота с намагниченными конечностями и «научили» свое детище взбираться по отвесным стенам металлических конструкций и ходить потолкам сооружений из указанного материала.
Подробности
Описание новинки опубликовано в научном издании Science Robotics. Авторы инновационной разработки Сеунгву Хонг, Йонг Ум, Хае-Вон Парк и Джеджун Парк рассказали об этапах создания, испытаний и возможностях своего творения.
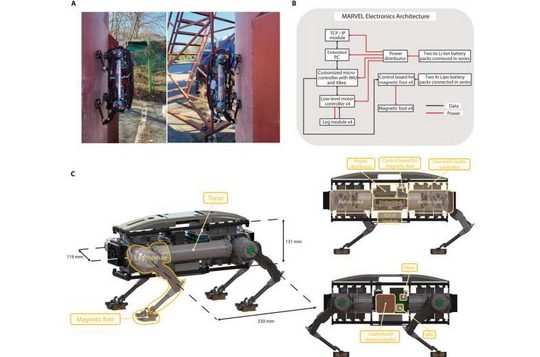
Мастера поставили перед собой цель создать «умный» аппарат для обслуживания крупных металлических конструкций вроде мостов, нефтяных резервуаров и т.д.. Им удалось сконструировать четырехногого робота, который способен с успехом перемещаться в горизонтальной и вертикальной плоскостях и даже по потолкам строений с помощью задействованных для этих целей магнитных эластомеров и электромагнитов.

Означенные аксессуары по команде оператора намагничивают/размагничивают конечности девайса. За счет включения/отключения магнетизма аппарат может одной конечностью вертикально цепляться за стену в ожидании прилипания остальных «ног», с последующим отпусканием одной из них для последующего шага.
Исследователи смогли запрограммировать свое детище на подъем, круговые движение и преодоление препятствий. Робот перемещается подобно кошке, сначала аккуратно проверяя поверхность передней «лапой», с последующей постановкой второй передней конечности и добавлением движения задних «ног».
В результате робот без проблем взбирается по металлическим стенам и «лазит» по потолку. В ходе дальнейших экспериментов аппарат смог забраться на открытый резервуар с ржавыми стенами.