")
Тріо фахівців з Кореї спільно з колегами зі США розробили чотирилапого робота з намагніченими кінцівками та “навчили” своє дітище підійматися прямовисними стінами металевих конструкцій і ходити стелями споруд із зазначеного матеріалу.
Подробиці
Опис новинки опубліковано в науковому виданні Science Robotics. Автори інноваційної розробки Сеунгву Хонг, Йонг Ум, Хае-Вон Парк і Джеджун Парк розповіли про етапи створення, випробування і можливості свого творіння.
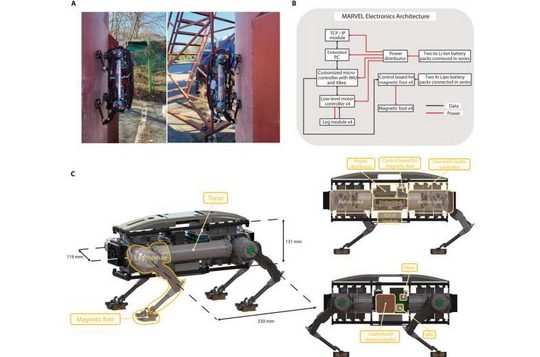
Майстри поставили перед собою мету створити “розумний” апарат для обслуговування великих металевих конструкцій на кшталт мостів, нафтових резервуарів тощо. Їм вдалося сконструювати чотириногого робота, який здатний з успіхом переміщатися в горизонтальній і вертикальній площинах і навіть стелями будівель за допомогою задіяних для цих цілей магнітних еластомерів і електромагнітів.

Зазначені аксесуари за командою оператора намагнічують/розмагнічують кінцівки девайса. Завдяки ввімкненню/вимкненню магнетизму апарат може однією кінцівкою вертикально чіплятися за стіну, чекаючи на прилипання решти “ніг”, з подальшим відпусканням однієї з них для подальшого кроку.
Дослідники змогли запрограмувати своє дітище на підйом, кругові рухи і подолання перешкод. Робот переміщається подібно до кішки, спочатку акуратно перевіряючи поверхню передньою “лапою”, з подальшою постановкою другої передньої кінцівки і додаванням руху задніх “ніг”.
У результаті робот без проблем підіймається по металевих стінах і “лазить” по стелі. Під час подальших експериментів апарат зміг забратися на відкритий резервуар з іржавими стінами.